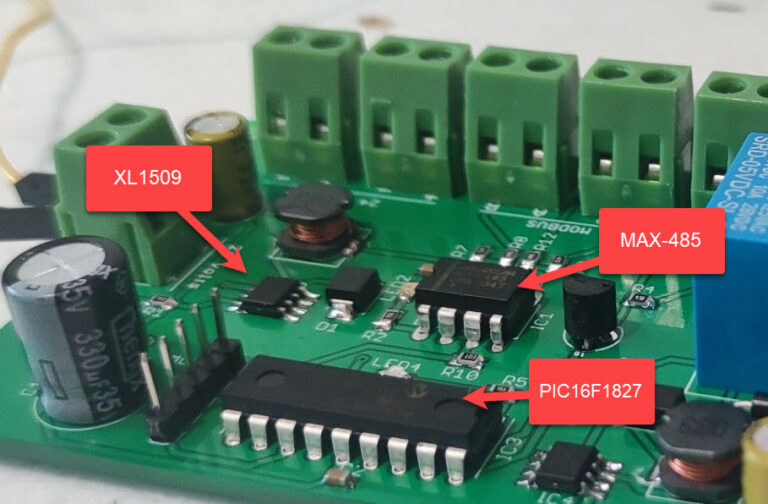
En este articulo se mostrará el diagrama esquemático de la PCB diseñada en EAGLE para la comunicación vía RS-485, se mostrarán exactamente las conexiones usadas y los componentes necesarios para su perfecto funcionamiento como el PIC16F1827 y el MAX-485.
Regulador de voltaje usado en el diseño: XL1509
Primero partimos del voltaje necesario para alimentar nuestros circuitos, suponemos que el voltaje de alimentación es de 12 o 24 volts, así que requerimos un regulador de voltaje de 5 volts pues el microcontrolador usado y el transceptor de RS-485 trabajan como comúnmente sabemos con 5 Volts de DC.
Lo primero que se nos ocurre es el regulador lineal 7805 obviamente, pero después de conocer el regulador conmutado XL1509, es por mucho nuestro preferido para usarlo en las PCBs que diseñamos, puedes ver más detalles del regulador en estos artículos, por si no lo conocías.
En esos artículos inclusos se pueden descargar ejemplos en EAGLE listos para incorporarlos en tus diseños.
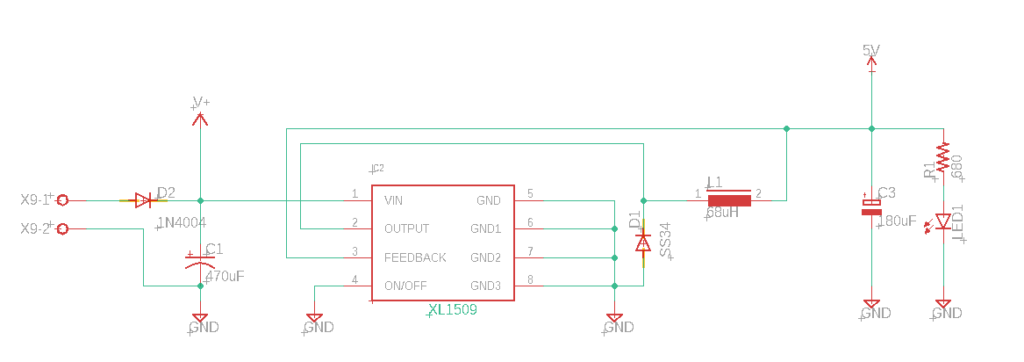
En la imagen siguiente se muestra el diagrama esquemático del regulador recomendada por el fabricante, es un regulador conmutado mucho más eficiente que los reguladores lineales, pero requiere de más componentes externos, como la bobina de 68 uH y el diodo Schottky (SS34 )
No hay mucho de que hablar del regulador, recibe 12 o 24 volts y lo baja y regula a 5 volts, incluye el diagrama el LED1 para indicar el encendido de la tarjeta.
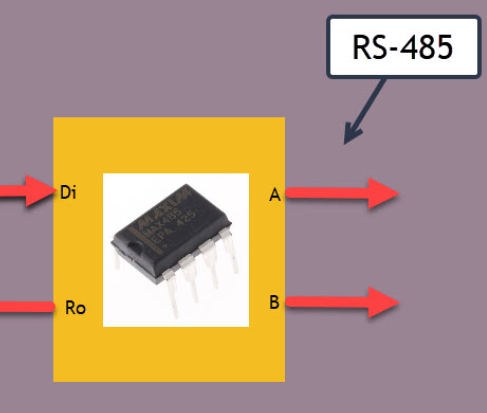
Transceptor RS-485
Justo al final del articulo pasado se mostraron los componentes a usar en la PCB, ahí se mostró el MAX-485 del fabricante Maxim Integrated Semiconductores fue el transceptor elegido para formar la red RS-485
En el siguiente enlace puedes ver la hoja de datos del MAX-485, donde el fabricante nos muestra todos los detalles de este interesante chip:
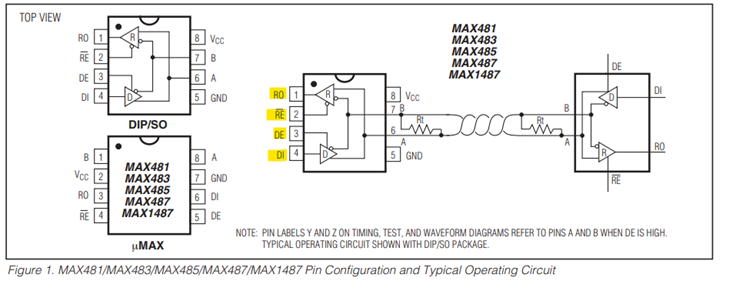
En una de las imágenes de la hoja de datos se muestra el diagrama de terminales y como se implementa la conexión para el protocolo RS-485, usando dos transceptores.
Observe en amarillo las señales de control necesarias para el MAX-485, estas señales como es de espararse ce conectan al microcontrolador para el envío y recepción de datos.
También note las patitas 8 (vcc) y 5 (GND) en la misma hoja de datos indica que el valor típico es de 5volts para Vcc, por ello el uso del regulador xl1509.
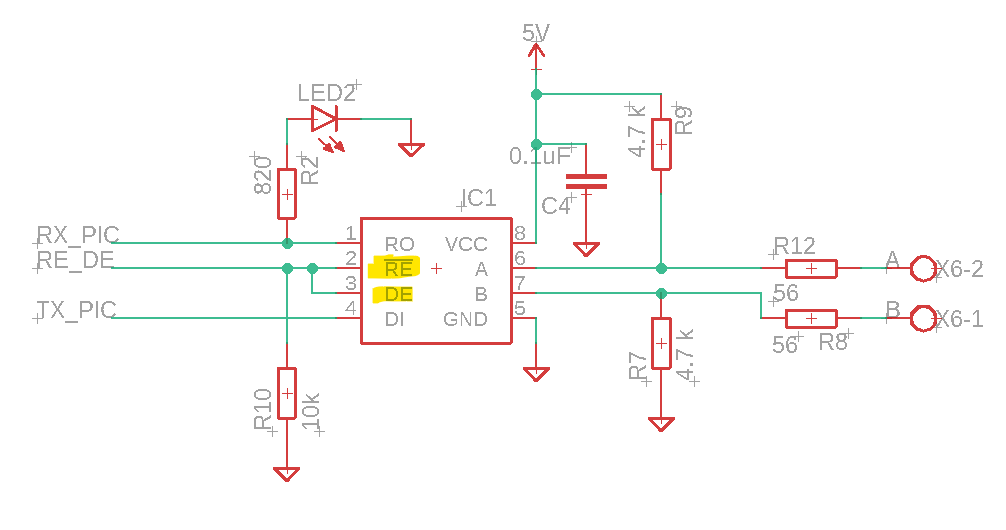
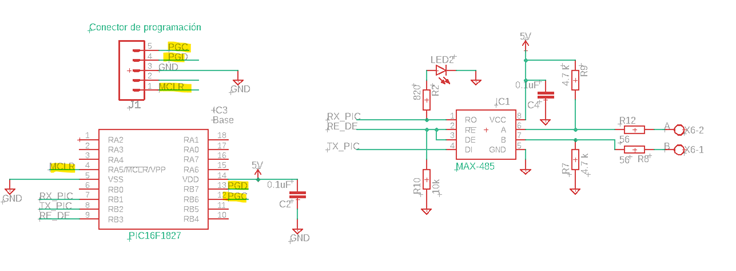
En la siguiente imagen se muestra el diagrama esquemático completo para esta parte de ña PCB. Observe las resistencias de Pull-Up, necesarias en las señales A y B.
También vea que no es necesario dos señales diferentes de control en los pines 2 y 3 del integrado, las remarco en amarillo en la imagen anterior.
Basta con conectar juntas esas señales, esos pines son los encargados de “decir” al integrado, si va a transmitir o recibir datos.
Como es el protocolo a dos hilos en un instante o transmite o recibe, e internamente una de ellas esta negada, es más que suficiente una línea para controlar la dirección.
Así es que solo requiero tres señales para controlar el MAX con el procesador usado, del cual se habla en la siguiente sección.
Microcontrolador PIC16F1827
También en la sección anterior se habló que el procesador a usar es PIC16F1827 del fabricante Microchip.}
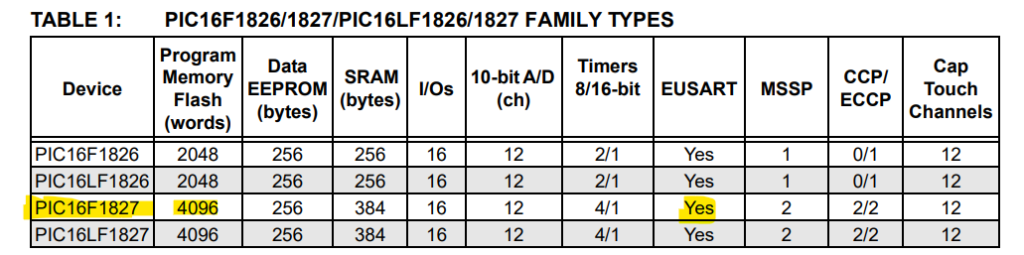
Algunas características interesantes se muestran en la siguiente imagen extraída de la datasheet
Bastante decente el microcontrolador, 4KB de memoria de programa, con modulo de comunicación serial (EUSART, Enhanced Universal Synchronous Asynchronous Receiver Transmitter ) suficiente para crear una red RS-485.
Si gustas puedes ver la hoja de datos de este microcontrolador dando clic aquí.
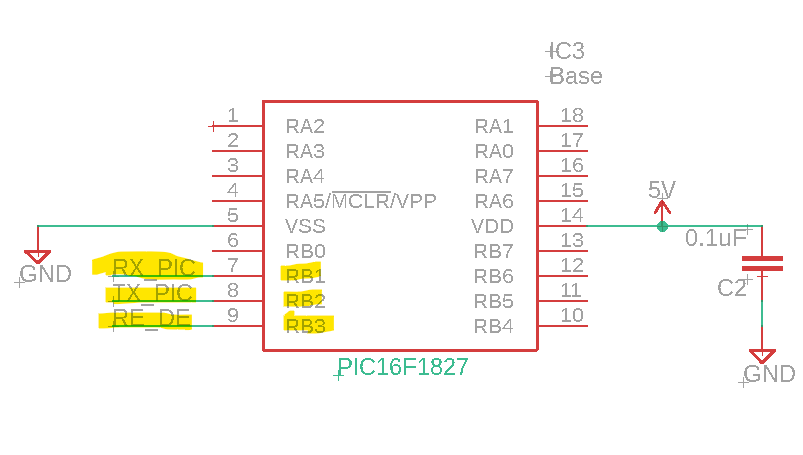
La imagen siguiente muestra las conexiones con el MAX-485.
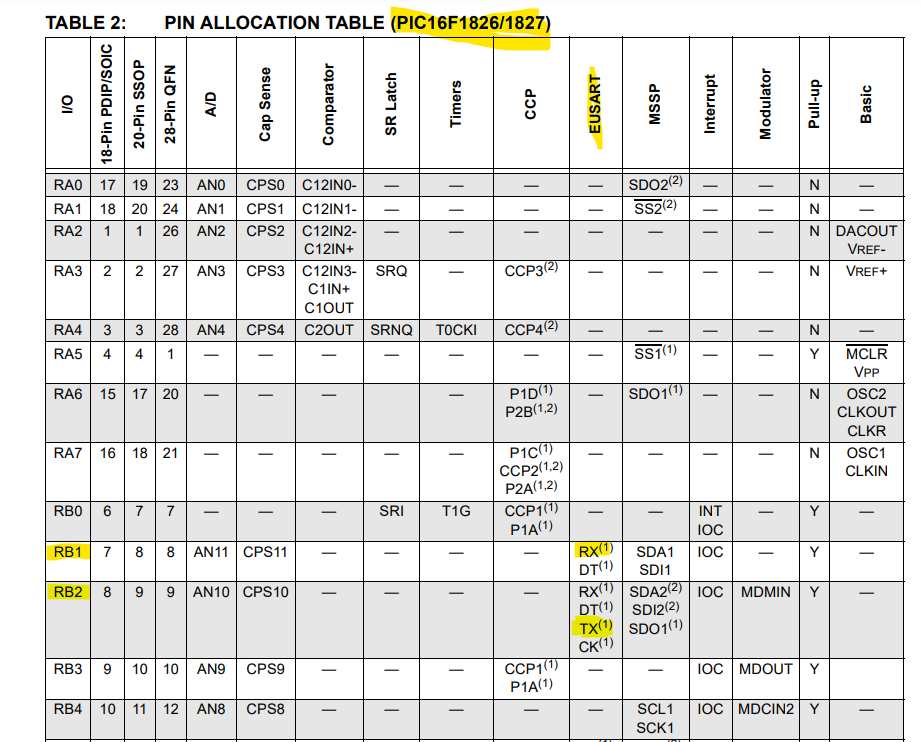
Sobra decir que esos pines el RB1 y el RB2 son elegidos especialmente para conectarse al MAX, pues son los que internamente viene del modulo EUSART como lo muestra en la siguiente imagen extraída también de la datasheet, donde se remarcan en amarillo.
RB1 es el la terminal para el receptor serial (Rx) del PIC y RB2 es la terminal del transmisor serial (Tx).
El pin que controla la dirección, del MAX-485 puede ser cualquier otra que sea de salida, nosotros elegimos el RB.
Conector de programación
Finalmente agregamos un conector de programación, pines macho, son los que casi siempre usamos para programar el dispositivo, compatibles con el programador PICKit 2.
La imagen siguiente muestra este conector de programación remarcado en amarillo.
También en la imagen se muestra la conexión completa a excepción del regulador XL1509 que se mostró en la parte de arriba.
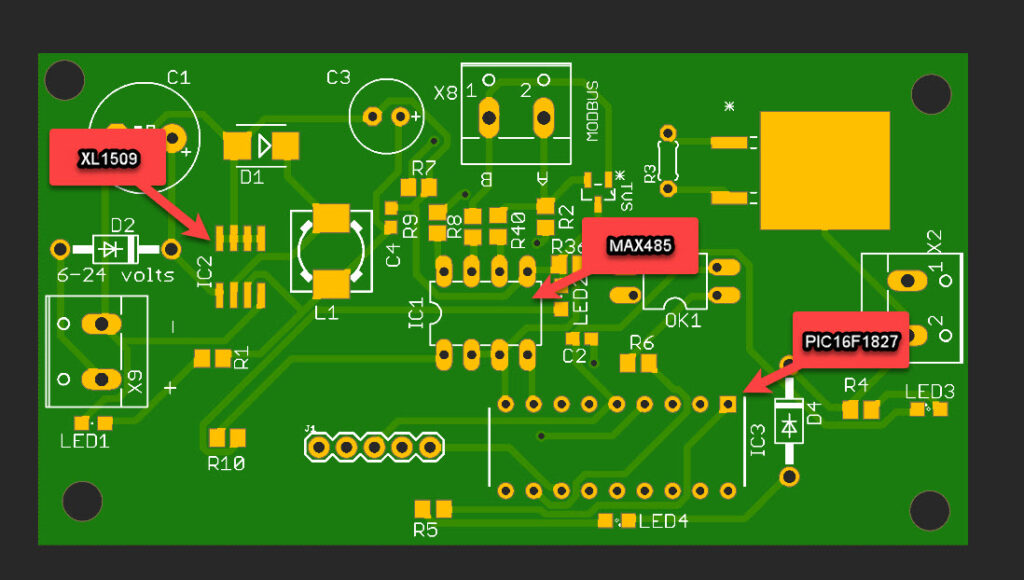
Diseño de la PCB
Lo que sigue es diseñar la PCB, pero ya no se muestra en este artículo en detalle, no lo veo necesario, pues la PCB diseñada depende para que aplicación se use.
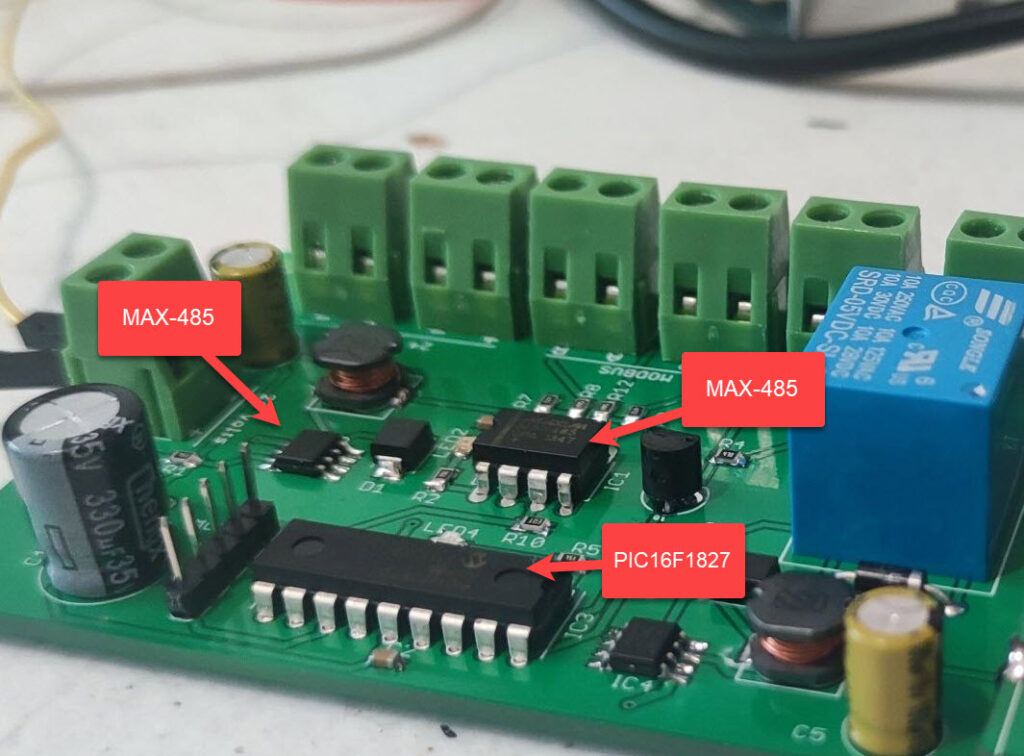
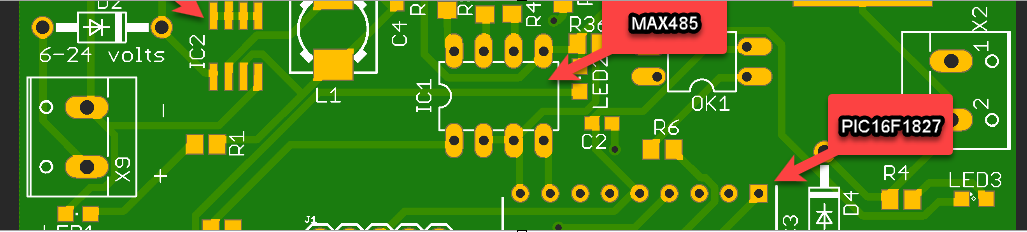
Enseguida simplemente muestro una imagen de la PCB diseñada, donde uso los componentes descritos en este articulo. Y al lado la versión final de esta PCB.
Con esto terminamos con el articulo donde se mostró el diagrama esquemático para implementar una red RS-485 a dos hilos.
Ahora viene lo interesante como se programó y las herramientas necesarias que usamos para probar la PCB, pero eso lo dejamos para la parte III, donde se programa el PIC16F1827 para recibir comandos via RS485, usando para ello el protocolo MODBUS.